|
|
|
[Sponsors] | ||||
 June 10, 2021, 04:30
June 10, 2021, 04:30
|
|
#1 |
|
New Member
Join Date: Feb 2020
Posts: 22
Rep Power: 6  |
Hello, everyone:
I am now using ‘contact detection’ function to keep a distance between two faces(one is stationary and the other is moving), some part of the UDF for contact detection is a little hard for me to understand since some macros cannot be found in UDF manual, so I am here asking for help to figure the whole things out. UDF code and my personal understanding of it have been presented in Figure 1 and Figure 2. Any advice will be appreciated, please help me understand those macros and share your point on the UDF code and my corresponding comments, thanks a lot! Regards, Silence UDF macros which cannot be found in UDF manual: 1.What is ‘Objp’? (Part 1, line 6) 2. Loop(o, contacts) (Par2 line 33) Loop the elements which pointer 'o' points to in contacts? 3.face = O_F(o) (Par2 line 35) 4.thread = O_F_THREAD(o) (Par2 line 36) 5.REAL_MIN (Par3 line 79) 6. SDOF_Get_Motion(dt, vel0, omega0, theta0) (Par4 line 113) Get the motion property of the structure which thread dt points to, velocity(vel0), revolution speed(omega0) and degree produced by revolution(theta0), am I right? 7. SDOF_Overwrite_Motion(ndt, vel1, omega1, theta1) (Par5 line 144) Overwrite the motion property of thread ‘ndt’, the new property of motion is: velocity_new = vel1, revolution speed_new = omega1 and degree_new = theta1, am I right? Logic problem 1./* 'Fetch current thread ID'---UDF manual, */, what does 'current thread' mean? (part 2, line 29), 2.tid = THREAD_ID(DT_THREAD(dt)), 'dt' was not defined in previous statement, why it can be used here? (part 2, line 30) 3.nid = -1; what is nid? why nid = -1? (part 2, line 31) 4.n_faces++, Obtain the total number of faces on face ‘nid’? (part 2, line 56) 5. N3V_S(xc, /=, n_faces), Is this operation to obtain the centroid of whole face? if so, is it an axiom? (part, line 81) 6. ndt = THREAD_DT(thread), convert thread to dynamic thread, thread is the pointer of face ‘nid’, why do this operation? (part 4, line 110) 7./* Reflect velocity across the normal */ v1dotn0 = 2 * N3V_DOT(vel1, norm0); N3V_S(norm0, *=, v1dotn0); N3V_V(vel1, -=, norm0); why not just N3V_V(vel1, -=, 2*vel1), why obtain the final vel1 through normal vector? (part 5, line 139-142)? 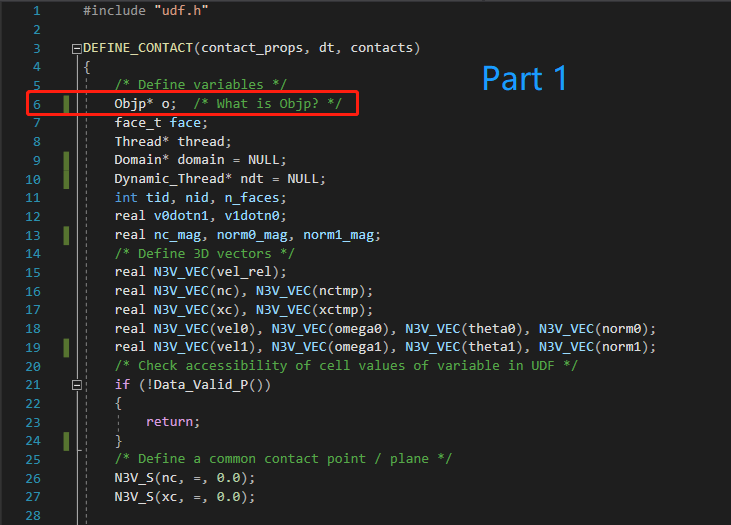 Figure 1a 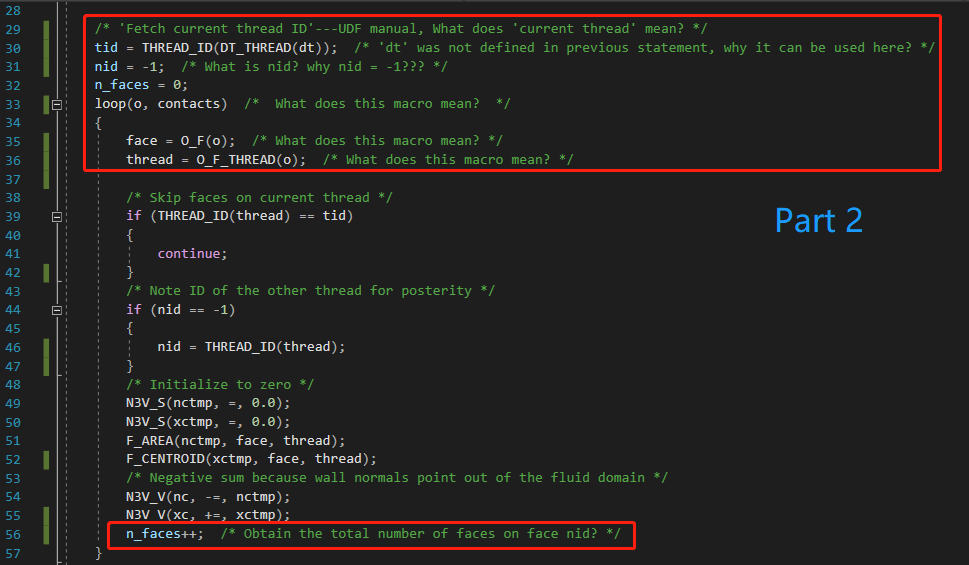 Figure 1b 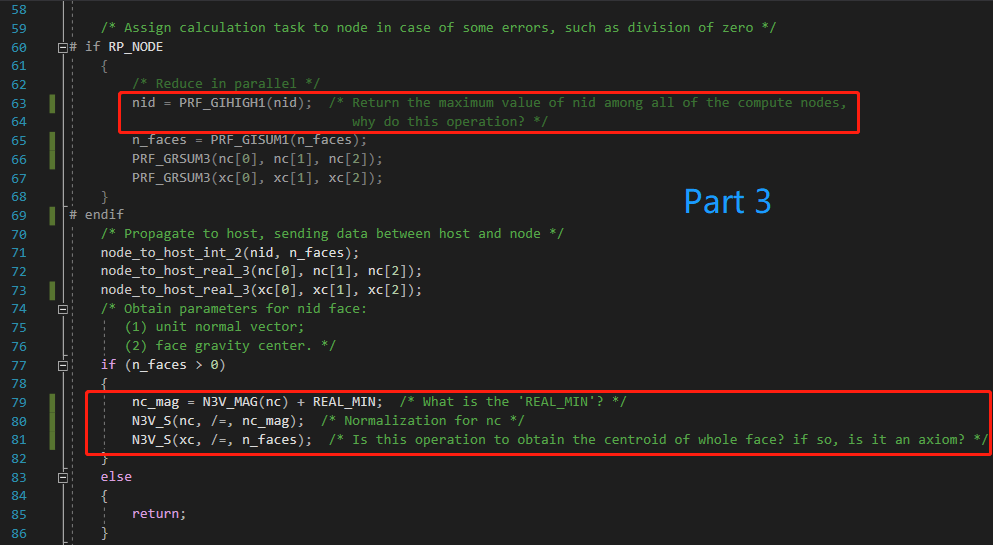 Figure 1c 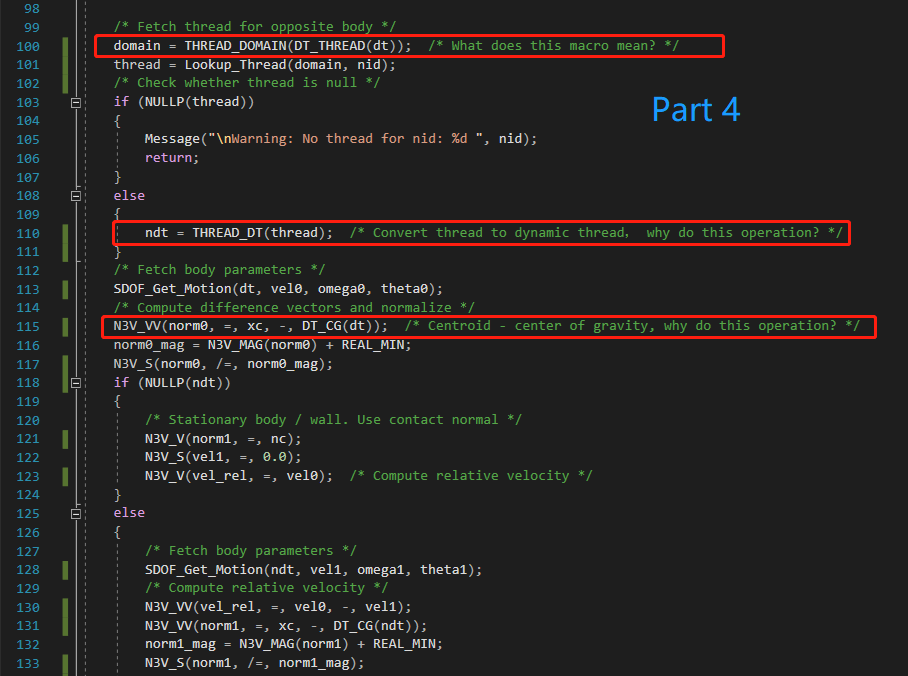 Figure 1d 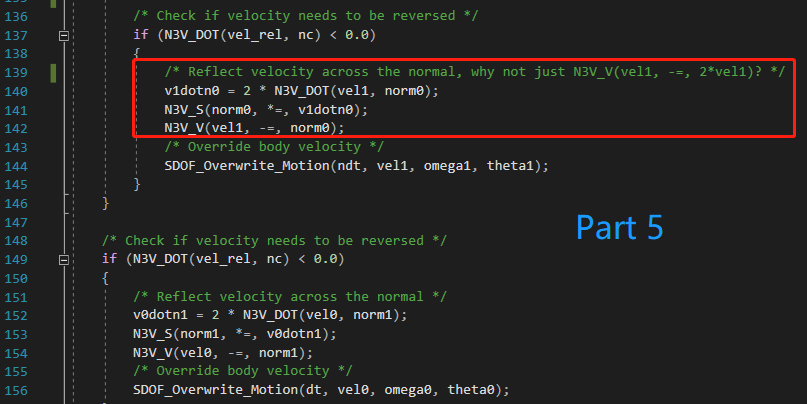 Figure 1e Code:
#include "udf.h"
DEFINE_CONTACT(contact_props, dt, contacts)
{
/* Define variables */
Objp* o; /* What is Objp? */
face_t face;
Thread* thread;
Domain* domain = NULL;
Dynamic_Thread* ndt = NULL;
int tid, nid, n_faces;
real v0dotn1, v1dotn0;
real nc_mag, norm0_mag, norm1_mag;
/* Define 3D vectors */
real N3V_VEC(vel_rel);
real N3V_VEC(nc), N3V_VEC(nctmp);
real N3V_VEC(xc), N3V_VEC(xctmp);
real N3V_VEC(vel0), N3V_VEC(omega0), N3V_VEC(theta0), N3V_VEC(norm0);
real N3V_VEC(vel1), N3V_VEC(omega1), N3V_VEC(theta1), N3V_VEC(norm1);
/* Check accessibility of cell values of variable in UDF */
if (!Data_Valid_P())
{
return;
}
/* Define a common contact point / plane */
N3V_S(nc, =, 0.0);
N3V_S(xc, =, 0.0);
/* 'Fetch current thread ID'---UDF manual, What does 'current thread' mean? */
tid = THREAD_ID(DT_THREAD(dt)); /* 'dt' was not defined in previous statement, why it can be used here? */
nid = -1; /* What is nid? why nid = -1??? */
n_faces = 0;
loop(o, contacts) /* What does this macro mean? */
{
face = O_F(o); /* What does this macro mean? */
thread = O_F_THREAD(o); /* What does this macro mean? */
/* Skip faces on current thread */
if (THREAD_ID(thread) == tid)
{
continue;
}
/* Note ID of the other thread for posterity */
if (nid == -1)
{
nid = THREAD_ID(thread);
}
/* Initialize to zero */
N3V_S(nctmp, =, 0.0);
N3V_S(xctmp, =, 0.0);
F_AREA(nctmp, face, thread);
F_CENTROID(xctmp, face, thread);
/* Negative sum because wall normals point out of the fluid domain */
N3V_V(nc, -=, nctmp);
N3V_V(xc, +=, xctmp);
n_faces++; /* Obtain the total number of faces on face nid? */
}
/* Assign calculation task to node in case of some errors, such as division of zero */
# if RP_NODE
{
/* Reduce in parallel */
nid = PRF_GIHIGH1(nid); /* Return the maximum value of nid among all of the compute nodes,
why do this operation? */
n_faces = PRF_GISUM1(n_faces);
PRF_GRSUM3(nc[0], nc[1], nc[2]);
PRF_GRSUM3(xc[0], xc[1], xc[2]);
}
# endif
/* Propagate to host, sending data between host and node */
node_to_host_int_2(nid, n_faces);
node_to_host_real_3(nc[0], nc[1], nc[2]);
node_to_host_real_3(xc[0], xc[1], xc[2]);
/* Obtain parameters for nid face:
(1) unit normal vector;
(2) face gravity center. */
if (n_faces > 0)
{
nc_mag = N3V_MAG(nc) + REAL_MIN; /* What is the 'REAL_MIN'? */
N3V_S(nc, /=, nc_mag); /* Normalization for nc */
N3V_S(xc, /=, n_faces); /* Is this operation to obtain the centroid of whole face? if so, is it an axiom? */
}
else
{
return;
}
#if RP_HOST
Message
(
"\nContact:: tid: %d nid: %d n_faces: %d "
"Point: (%f %f %f) Normal: (%f %f %f)",
tid, nid, n_faces,
xc[0], xc[1], xc[2],
nc[0], nc[1], nc[2]
);
#endif
/* Fetch thread for opposite body */
domain = THREAD_DOMAIN(DT_THREAD(dt)); /* What does this macro mean? */
thread = Lookup_Thread(domain, nid);
/* Check whether thread is null */
if (NULLP(thread))
{
Message("\nWarning: No thread for nid: %d ", nid);
return;
}
else
{
ndt = THREAD_DT(thread); /* Convert thread to dynamic thread, why do this operation? */
}
/* Fetch body parameters */
SDOF_Get_Motion(dt, vel0, omega0, theta0);
/* Compute difference vectors and normalize */
N3V_VV(norm0, =, xc, -, DT_CG(dt)); /* Centroid - center of gravity, why do this operation? */
norm0_mag = N3V_MAG(norm0) + REAL_MIN;
N3V_S(norm0, /=, norm0_mag);
if (NULLP(ndt))
{
/* Stationary body / wall. Use contact normal */
N3V_V(norm1, =, nc);
N3V_S(vel1, =, 0.0);
N3V_V(vel_rel, =, vel0); /* Compute relative velocity */
}
else
{
/* Fetch body parameters */
SDOF_Get_Motion(ndt, vel1, omega1, theta1);
/* Compute relative velocity */
N3V_VV(vel_rel, =, vel0, -, vel1);
N3V_VV(norm1, =, xc, -, DT_CG(ndt));
norm1_mag = N3V_MAG(norm1) + REAL_MIN;
N3V_S(norm1, /=, norm1_mag);
/* Check if velocity needs to be reversed */
if (N3V_DOT(vel_rel, nc) < 0.0)
{
/* Reflect velocity across the normal, why not just N3V_V(vel1, -=, 2*vel1)? */
v1dotn0 = 2 * N3V_DOT(vel1, norm0);
N3V_S(norm0, *=, v1dotn0);
N3V_V(vel1, -=, norm0);
/* Override body velocity */
SDOF_Overwrite_Motion(ndt, vel1, omega1, theta1);
}
}
/* Check if velocity needs to be reversed */
if (N3V_DOT(vel_rel, nc) < 0.0)
{
/* Reflect velocity across the normal */
v0dotn1 = 2 * N3V_DOT(vel0, norm1);
N3V_S(norm1, *=, v0dotn1);
N3V_V(vel0, -=, norm1);
/* Override body velocity */
SDOF_Overwrite_Motion(dt, vel0, omega0, theta0);
}
#if RP_HOST
Message
(
"\ncontact_props: Updated :: vel0 = (%f %f %f) vel1 = (%f %f %f)",
vel0[0], vel0[1], vel0[2], vel1[0], vel1[1], vel1[2]
);
#endif
}
|
|

|

|
|
 |
| Tags |
| contact detection, udf code |
|
|
 Similar Threads
Similar Threads
|
||||
| Thread | Thread Starter | Forum | Replies | Last Post |
| UDF for dynamic Contact Angle | Wolfgang.Black | FLOW-3D | 0 | May 26, 2020 15:20 |
| Source Term UDF VS Porous Media Model | pchoopanya | Fluent UDF and Scheme Programming | 1 | August 28, 2013 06:12 |
| UDF for Contact Angle | gandesk | Fluent UDF and Scheme Programming | 1 | November 1, 2010 09:00 |
| shock detection in the Riemann problems(specially in the stationary contact problems) | smkhan | Main CFD Forum | 1 | July 10, 2010 08:24 |
| UDF for dynamic contact angle | Aireen | FLUENT | 0 | August 11, 2006 11:08 |
 1Likes
1Likes
 Linear Mode
Linear Mode







